
Picture Set
To define a new picture set, right-click on the project item in the project tree and choose "Add Picture Set...". Alternatively, left-click on the project item and click on the button named "Add Picture Set..." in the area below.
A new dialog opens:
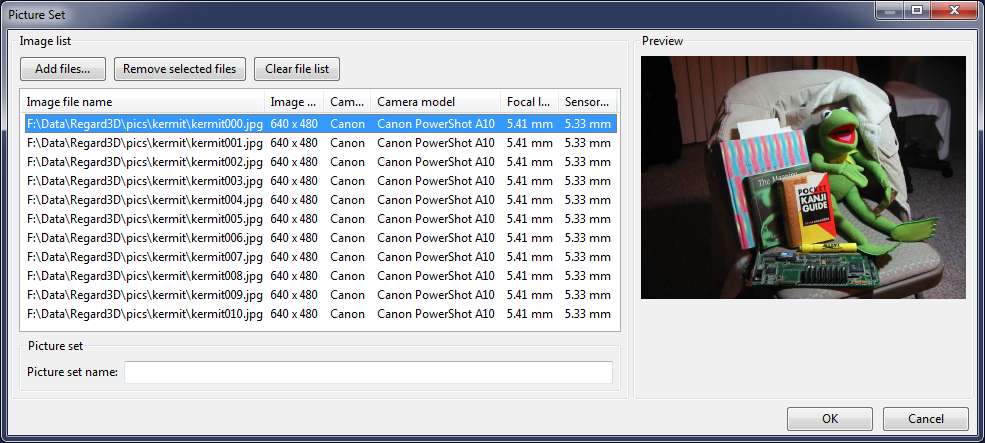
Add pictures that you would like to use for calculating a 3D model. You can do this either
- By clicking the "Add files..." button and selecting them in the file dialog, or
- By dragging-and-dropping them from the Windows Explorer/Finder into this dialog
The images should satisify the following criteria for best results:
- Currently only JPEG images are supported
- The focal length (zoom setting) and the sensor size of at least some of the pictures must be known. That means that:
- The metadata (EXIF) must be present, providing the focus length, the camera maker and model
- The camera must be known to Regard3D (is in the camera database)
- The images should have a good quality: Well lit, in focus and a high resolution
- The images should provide a full view of the object. A good rule of thumb is: If any particular point on the object is not seen by at least 3 images, it will not be in the resulting 3D model
If your camera is not known (the column "Sensor width" shows "N/A" for "not available"), please perform the following steps:
- Find out the exact model of your camera (for example by looking at the columns "Camera maker" and "Camera model"), and determine the sensor width of the camera by searching for its characteristics in the internet
- Right-click a picture of this camera, and select "Set sensor width...". In the dialog, enter the sensor width in mm you found in the internet.
- After clicking "OK", the new sensor width is stored in the User-Defined camera database.
For more experienced users: There is also a file called "sensor_database.csv". The file is located in Windows in the path C:\Users\[User name]\AppData\Local\Regard3D, on OS X in the installation directory of Regard3D (usually /Applications/Regard3D.app/Contents/Resources). This contains the openMVG sensor size database. When new pictures are loaded in Regard3D, first the user-defined database is consulted, then "sensor_database.csv". This way, it is possible to override manually the entries in "sensor_database.csv".
For more information about the file, see here:
https://github.com/openMVG/CameraSensorSizeDatabase
If you entered a wrong value or would like to clean the user-defined camera database, select the menu "Options" - > "Edit user camera DB". The dialog shows the entries stored in the database, and you can select and delete certain or all entries.
Go to next article: Compute Matches